Description:
A 3-axis accelerometer sits at the heart of this project to provide a nifty little motion detector. Want to know who is stealing from the cookie jar? Want a simple home intrusion detector? Or to test your partner's driving skills? Then have a look at this:
(Soldering required for this project)
Video:
Parts Required:
Instructions:
Connect digital pin 8 to an LED and 330 ohm resistor on the breadboard,
Use a wire to connect the resistor mentioned above to GND on the protoboard Connect the USB cable from your computer to the Freetronics Eleven, and upload the Arduino Sketch to the board. Disconnect the USB cable, and then power the Freetronics Eleven using a 9V battery and clip. When you press the button, it will sound 3 warning sounds before it becomes activated. If it detects a vibration or motion that exceeds the tolerance level, it will alarm. The alarm will continue until you either press the Grove button - which resets and reactivates the device or you can press the Reset button on the Base Shield to Stop monitoring for motion.
Sketch
![]()
![]()
![]()
Freetronics Eleven / Arduino Sketch:
A 3-axis accelerometer sits at the heart of this project to provide a nifty little motion detector. Want to know who is stealing from the cookie jar? Want a simple home intrusion detector? Or to test your partner's driving skills? Then have a look at this:
(Soldering required for this project)
Video:
Parts Required:
- Freetronics Eleven or any compatible Arduino
- Freetronics 3-Axis Accelerometer Module
- Male header pins
- Seeed Studio's Grove Base Shield
- Seeed Studio's Universal Cables
- Seeed Studio's Grove Button
- Seeed Studio's Grove Buzzer
- Mini Breadboard 4.5cm x 3.5cm
- Protoshield and female header pins
- 1 x LED
- 330 ohm resistor
- Wires
- 9V Battery + Battery Clip
Instructions:
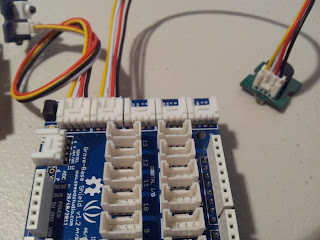
- Overlay the Seeed Studio Base Shield onto the Freetronics Eleven (or compatible Arduino).
- Use a Universal Cable to attach a Seeed Studio Grove Button to Analog Pin 0 on the Base Shield. The socket is located directly above the Freetronics Eleven Power plug, and next to the Reset button on the Base Shield. Please note that Analog Pin 1 is not used by the Grove Button.
- Use a universal Cable to attache a Seeed Studio Grove Buzzer to Analog Pin 1 on the Base Shield. This is the socket next to the one used in Step 2.
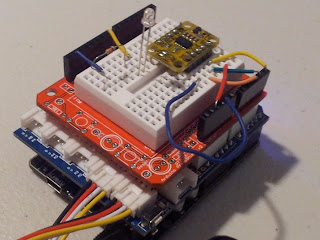
- Solder the female header pins to the Protoboard. Overlay the protoboard onto the Base Shield to create a third layer. I created this layer to tidy up the project and make it a little bit more portable. You could just wire up another breadboard on the side.
- Stick a mini-breadboard (4.5cm x 3.5cm) onto the protoboard. This allows you to use the protoboard for other projects.
- Solder the male headers to the 3-axis accelerometer, and then place it centrally onto the breadboard.
- You need 5 wires to connect:
- GND on protoboard to GND on accelerometer
- 5V on protoboard to VIN on accelerometer
- Analog Pin 3 on protoboard to X on accelerometer
- Analog Pin 4 on protoboard to Y on accelerometer
- Analog Pin 5 on protoboard to Z on accelerometer
Sketch

Freetronics Eleven / Arduino Sketch:
1 | //Motion Detector Alarm - Written by ScottC on 2/08/2012 |